软件更新日志
Version1.0
CubeRobot,一款基于QT的魔方机器人控制程序。
发行时间:2023.2.25
功能说明:
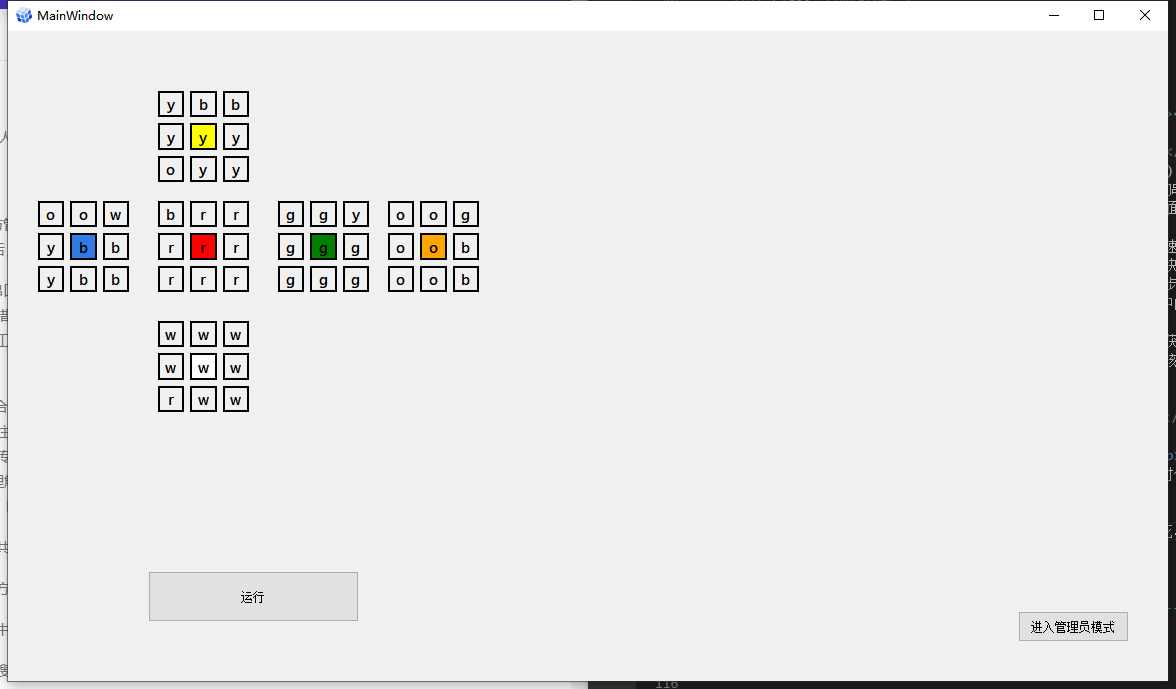
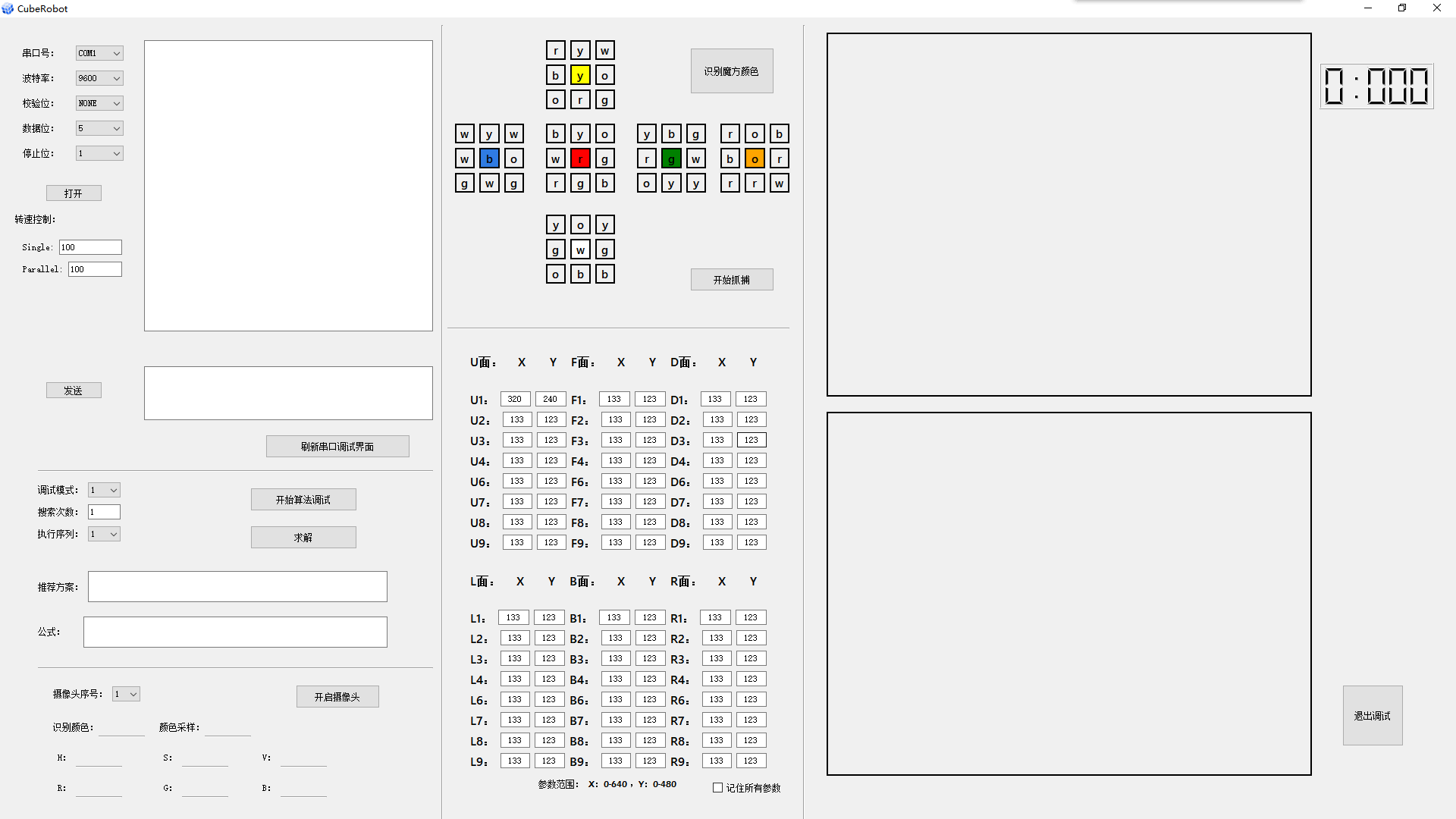
1、面板模式:软件分为用户模式,与管理员模式(需要账密激活)。用户模式下可直接运行,向下位机发送指令(暂未激活);进入管理员模式后,可获得高级权限,在此面板中可以调试各种细微的参数。
 用户模式
用户模式
 管理员模式
管理员模式
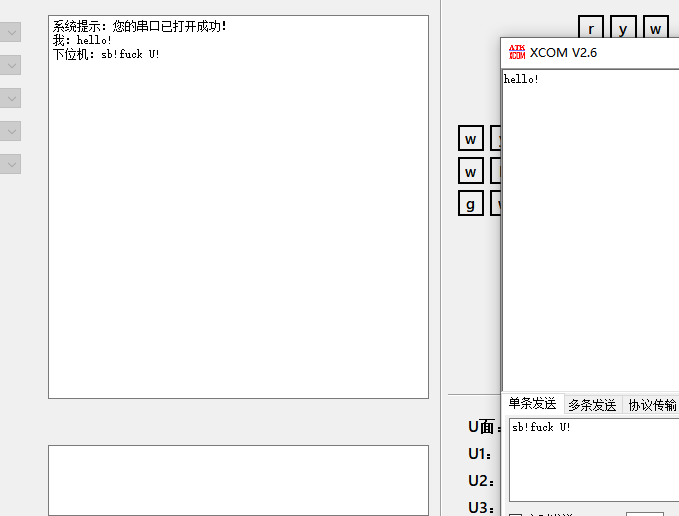
2、串口助手:作为您的一个简单的串口调试助手,它具有基础的串口收发功能。
 串口通讯工具
串口通讯工具
但他远不止串口助手一个功能,其内部集成的帮助文档,报错信息以及系统提示语,可以帮助您在调试机器的时候快速找到问题所在;除此之外其他工具如算法调试工具,图像处理工具在使用过程中可能会将编码自动整理好放在您的对话框中,等待您的指令进行发送。
 指令提示语言
指令提示语言
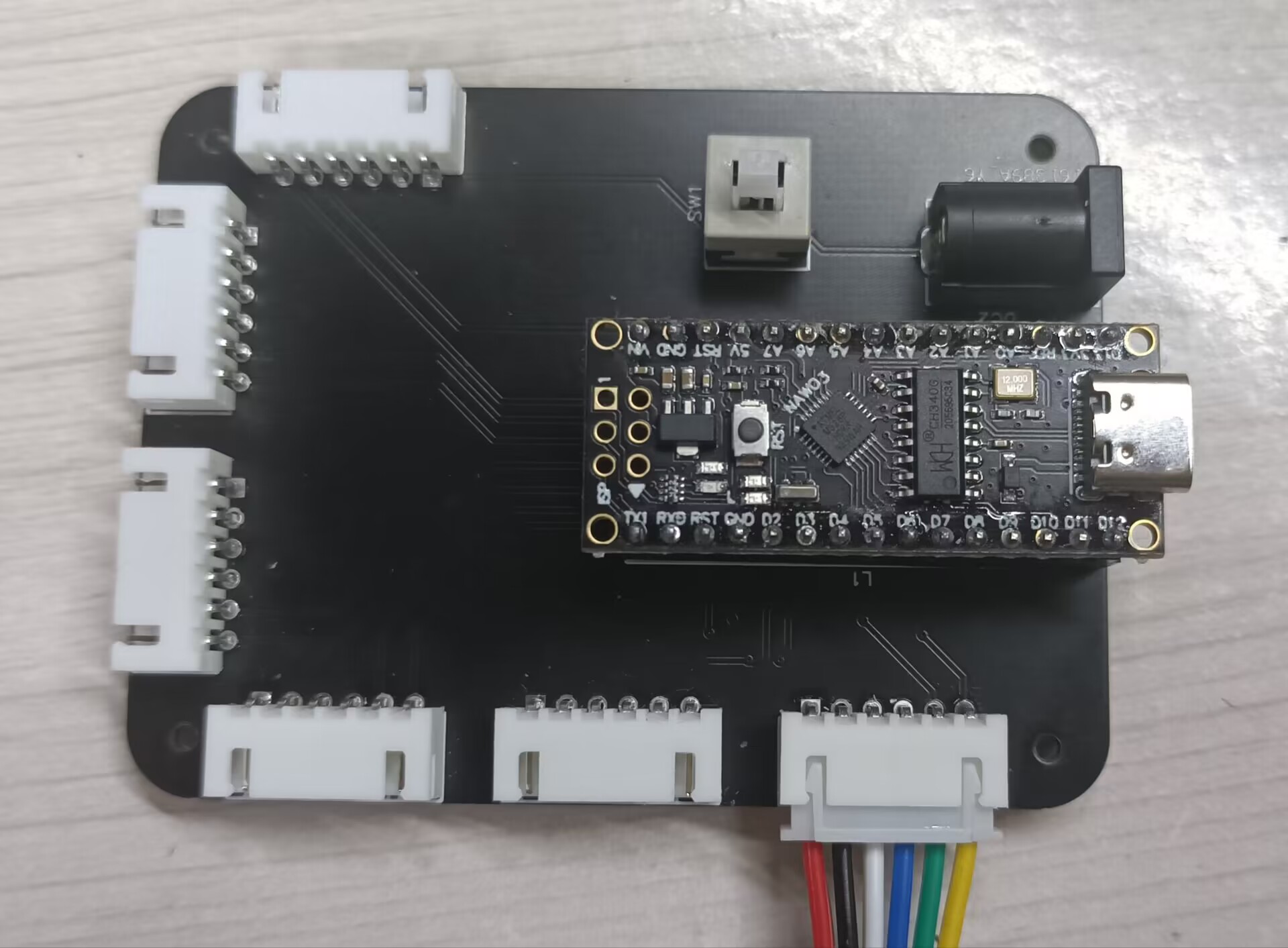
3、PWM电机调速工具:该接口需配合下位机使用。因为在机械层面,同时转两面与单独转一面对魔方的要求截然不同,两面同时转的要求往往会更高,故而这里将并行控制与单线程的电机PWM控制方法分开,并将该算法集成在下位机中。其传入的参数并非占空比,而是延时参数,若输入200,则表示每间隔200发送一次信号。简单来说,可以理解为该参数越小,电机运动越快,一般来说参数应大于等于0,为整数。Singal表示单电机对应的参数,Parallel表示多电机控制时对应的参数。
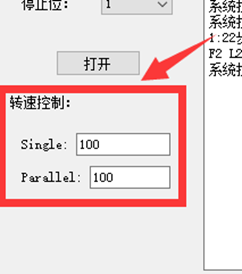 PWM电机调速工具
PWM电机调速工具
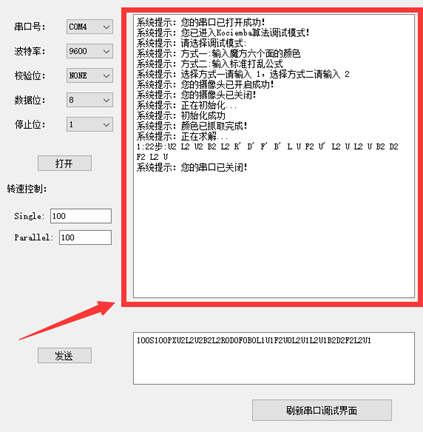
4、Kociemba算法调试工具:该工具共两种模式。
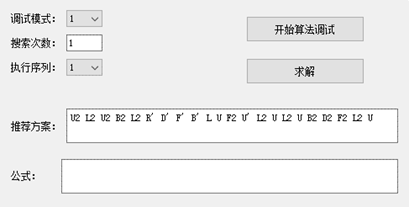 Kociemba算法调试工具
Kociemba算法调试工具
进入模式一后,程序会读取中间的魔方展开图中的颜色,进行快速求解
进入模式二后,您可以在公式输入框中键入标准打乱公式,进行快速求解。
您在这个模块您可以自定义对解法的搜索次数,搜索次数越多,步骤会越趋近于最优解,但对性能的消耗也越高,所以您应当合理配置递归次数以防止程序崩溃。另一方面您也可以借助该工具自主的去搜索一些魔方公式(如PLL,ZBLL等)。
最后程序会将生成的算法中截取你希望的推荐算法,并结合pwm中的参数生成与下位机匹配的编码并放到串口对话框等待您的发送指令。另外若您在一开始点击激活了算法调试模式,这会自动开启最右上角的计时器,当您点击发送,将生成的编码发给下位机时,计时器会开始计时,当机器人完成复原后,下位机芯片会向PC端发送指令停止计时,让您更直观的看到其还原时间。
5、图像识别工具:该工具共两种模式。
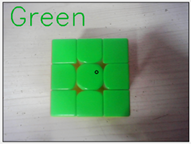
进入模式一后,您可以通过该工具来调用您的外接摄像头,并捕获识别点的RGB与HSV模型中的参数,同时软件会将捕获的色块与魔方临近色匹配显示在魔方展开图中。因为不同的相机可能会存在质量差异,如对环境光的敏感度,视频帧率,颜色容差等等,您可以通过该模式测试您的相机是否能够正常工作以满足您在项目中的要求。
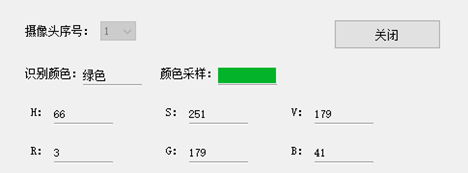 颜色采集工具(模式一)
颜色采集工具(模式一)
 摄像头面板
摄像头面板
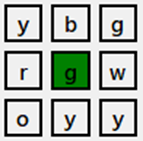 邻近色匹配显示面板
邻近色匹配显示面板
进入模式二后,您将开启识别魔方颜色的权限,注意此时,您应该确保您的设备已经连接好至少两个摄像头以防止运行过程中程序崩溃,若您电脑只有一个摄像头,您可以尝试使用手机无线或有线连接到电脑上,我们的软件会自主调用您的手机摄像头。若一切妥当此时可以点击中间的”识别魔方颜色“按钮,此时您可以结合下方的参数面板调整您需要的识别点阵,程序会将识别到的颜色根据内部的匹配算法,将识别好的色块更新到中间的魔方展开图中。由于内部算法为while(true)类型的,您不必先修改参数再打开摄像头,然后再关闭摄像头修改参数,您可以在开启摄像头的同时直接修改参数,我们的识别点会立即响应,大大提高您的调试效率。
Version1.1(demo版)
该版本为demo版,可能会有一定的不稳定性,正在测试中。
更新时间:2023.3.13
更新说明:
1、更新了UI界面,增强用户体验(目前UI仅为测试版本,可能随时优化以达到全局协调,兼容设备)。
2、加入了部分动效。
3、嵌入官网链接,用户可不定期更新。
4、该版本是demo版不用提醒我哪里有bug,我有眼睛0.0!555累死。
 Version1.1
Version1.1
Version1.2(beta版)
该版本为beta版,可能会有一定的不稳定性,正在测试中。
更新时间:2023.3.26
更新说明:
1、修复了颜色识别时没有颜色和文本的bug。
2、新增了单独的电机调试面板。
3、修改官网链接
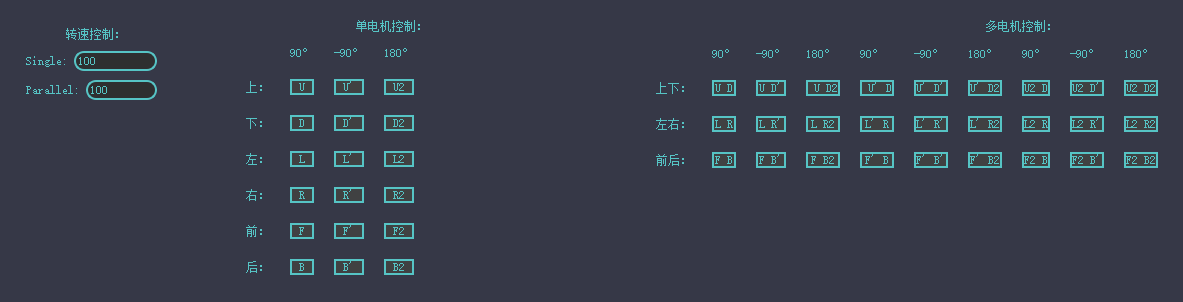 电机控制面板
电机控制面板