产品简介
CubeRobot,一款用于魔方机器人控制软程序,同时支持了多项功能,分为了两种不同模式,让您在简洁与细致间体验高效调试的快感。
独特的设计理念
摆脱了制作机器人时候对于编程的依赖,用最短的时间做更多的事,学更好的思想。
直观的交互体验
致力于零门槛上手操作,为您节省不必要的时间,让每位创作者全心致力于设计。
高效的后台支持
若发现bug可联系后台作者,后台会在一定时间内高效修复您的问题。并不定期更新维护程序。
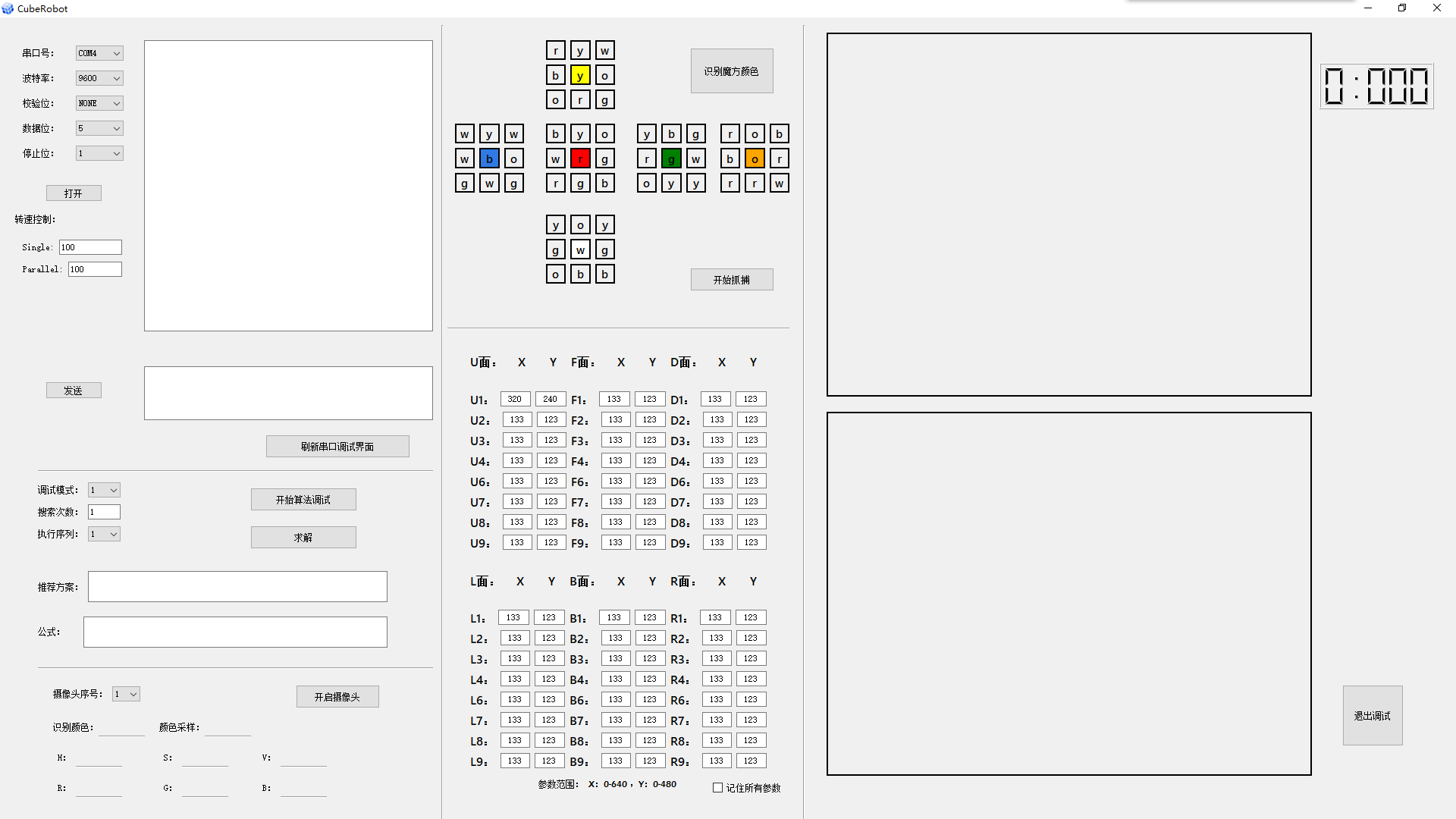
功能介绍
该程序有着丰富的调试接口,同时对于各个参数都有着选择记忆功能,防止因为反复调参或数据丢失而造成的时间浪费。
串口通讯工具
您可以用该工具作为您的一个简单的串口调试助手,它具有基础的串口收发功能。
PWM电机调速工具
您可以通过该接口直观的调整电机的占空比。
Kociemba算法调试工具
算法调试具有两种模式,一种是读取六面颜色,一种是输入打乱公式,二者都可以快速的求解。在这个模块您可以自定义对解法的搜索次数,搜索次数越多,步骤会越趋近于最优解,但对性能的消耗也越高,所以您应当合理配置递归次数以防止程序崩溃。另一方面您也可以借助该工具自主的去搜索一些魔方公式(如PLL,ZBLL等)。
图像识别工具
您可以通过该工具来调用您的外接摄像头,并捕获识别点的RGB与HSV模型中的参数,同时将捕获的色块与魔方临近色匹配显示在魔方展开图中。
硬件处理方案简介
这里的下位机核心部件是使用ATMega328p芯片的Arduino nano开发板,搭配6个MKS SERVOR42C步进电机作为六个机械臂驱动,其余机械结构采用3d打印技术...
了解更多
PCB_Version1.0
此PCB为双面板,可以简单看作是一个可以接入24V的扩展板,它能够为六个步进电机稳定供电,保证Arduino Nano能够与各个驱动PCB版块的信号传输正常。
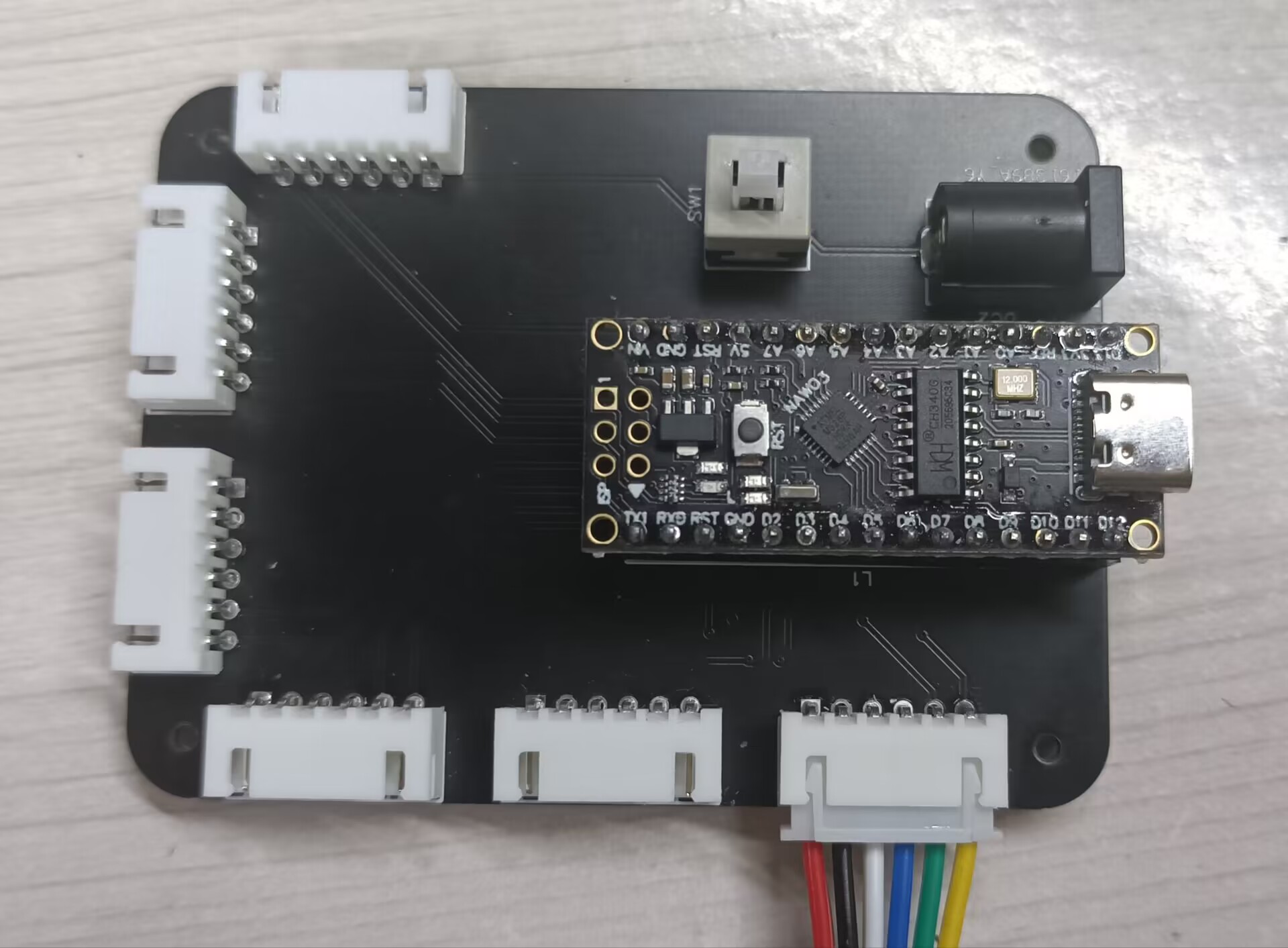
PCB_Version1.1
此版本在Version1.0的基础上做了部分优化。
1.重新优化了走线布局。
2.同样采用的是ATMega328P芯片,但将nano的mini-USB串口改为了更为通用的Type-C接口。
3.加入了自锁型8.5x8.5按键开关来降低热插拔带来的电气损害。
4.四角嵌入了螺丝空位以便于PCB板在机械结构上的固定。
5.在Version1.0中每个电机将独立占用16个接口,为了进一步减少对空间的消耗,在Version1.1中将连接接口改为了XH2.54端口,仅占用5个接口,减少了接口空间的浪费。
PCB_Version1.2
开发中